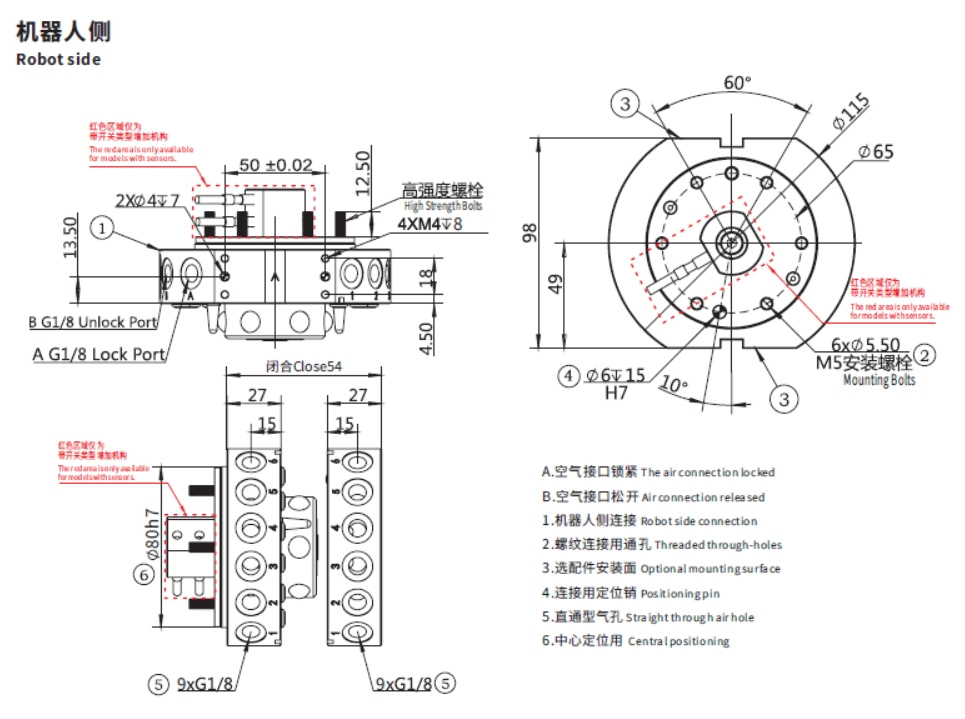
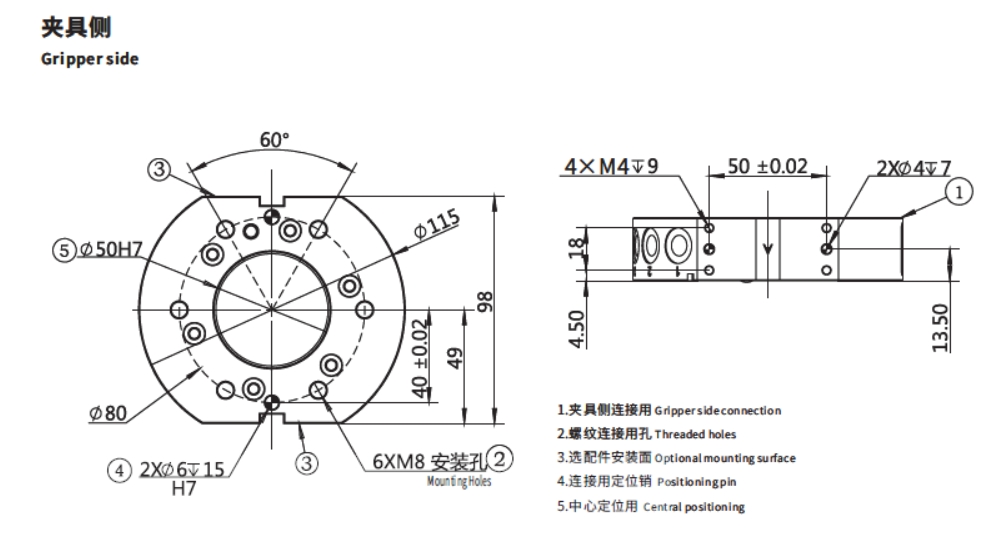
Usoro Mgbanwe Ngwa Ngwa – QCA-50 Ngwaọrụ Mgbanwe Ngwa Ngwa na njedebe nke Robot



Isi Nkewa
Ngwa Mgbanwe Ngwa Robot / Ngwa Mgbanwe Ngwa Ọgwụgwụ Aka (EOAT) / Sistemụ Mgbanwe Ngwa Ngwa Ngwa Akpaka / Ngwa Nhazi Ngwa Robot / Akụkụ Robot / Akụkụ Gripper / Mgbanwe Ngwa Ngwaọrụ / Mwepụta Ngwa Ngwa / Ngwa Mgbanwe Ngwa Ngwa Pneumatic / Ngwa Mgbanwe Ngwaọrụ Electric / Ngwa Mgbanwe Ngwa Hydraulic / Ngwa Mgbanwe Ngwa Nhazi / Usoro Mkpọchi Nchekwa / Mmepụta Ọgwụgwụ / Akpaaka / Nhazi Mgbanwe Ngwa Ngwaọrụ / Mgbanwe Ngwaọrụ / Ngwa Nhazi Ọrụ / Ngwa Nhazi Ọrụ / Ngwa Nhazi Ngwa Ngwa Robot / Nhazi Modular
Ngwa
A na-eji ngwa ọrụ End-of-Arm Tooling (EOAT) eme ihe nke ukwuu n'ụlọ ọrụ dịka imepụta ụgbọala, ngwa eletrọnịkị 3C, nhazi ngwa ahịa, ịkpụzi ihe ntụtụ, nkwakọ ngwaahịa nri na ọgwụ, na nhazi ígwè. Ọrụ ya bụ isi gụnyere ijikwa ihe eji arụ ọrụ, ịgbado ọkụ, ịgba mmiri, inyocha, na mgbanwe ngwa ngwa. EOAT na-eme ka arụmọrụ mmepụta, mgbanwe, na ịdị mma nke ngwaahịa dịkwuo mma nke ukwuu, na-eme ka ọ bụrụ akụkụ dị mkpa nke akpaaka ụlọ ọrụ ọgbara ọhụrụ.
atụmatụ
Ezigbo nkenke
Akụkụ ihe njide piston na-arụ ọrụ nke nhazi, nke na-enye izi ezi nke nhazi ugboro ugboro. Nnwale okirikiri otu nde na-egosi na izi ezi ahụ dị elu karịa uru akwadoro.
Ike dị elu
Piston mkpọchi nwere dayameta silinda buru ibu nwere ike mkpọchi siri ike, ngwaọrụ ngwa ngwa nke SCIC robot nwere ikike mgbochi torque siri ike. Mgbe a na-akpọchi ya, ọ gaghị enwe ịma jijiji n'ihi mmegharị ọsọ dị elu, si otú a na-ezere ọdịda mkpọchi ma hụ na e nwere izi ezi n'ọnọdụ ya ugboro ugboro.
Arụmọrụ dị elu
A na-eji usoro mkpọchi nke nwere ọtụtụ ihe eji eme ihe dị iche iche, ihe mkpuchi ogologo oge na nyocha kọntaktị dị elu dị elu iji hụ na modulu mgbaàmà ahụ nwere njikọ chiri anya.



Nhazi nkọwapụta
| Usoro Mgbanwe Ngwa Ngwa | ||||
| Ụdị nlereanya | Ibu kachasị elu | Ụzọ gas | Ike Mkpọchi@80Psi (5.5Bar) | Ibu ngwaahịa |
| QCA-05 | 5kg | 6-M5 | 620N | 0.4kg |
| QCA-05 | 5kg | 6-M5 | 620N | 0.3kg |
| QCA-15 | 15kg | 6-M5 | 1150N | 0.3kg |
| QCA-25 | 25kg | 12-M5 | 2400N | 1.0kg |
| QCA-35 | 35kg | 8-G1/8 | 2900N | 1.4kg |
| QCA-50 | 50kg | 9-G1/8 | 4600N | 1.7kg |
| QCA-S50 | 50kg | 8-G1/8 | 5650N | 1.9kg |
| QCA-100 | 100kg | 7-G3/8 | 12000N | 5.2kg |
| QCA-S100 | 100kg | 5-G3/8 | 12000N | 3.7kg |
| QCA-S150 | 150kg | 8-G3/8 | 12000N | 6.2kg |
| QCA-200 | 300kg | 12-G3/8 | 16000N | 9.0kg |
| QCA-200D1 | 300kg | 8-G3/8 | 16000N | 9.0kg |
| QCA-S350 | 350kg | / | 31000N | 9.4kg |
| QCA-S500 | 500kg | / | 37800N | 23.4kg |

Akụkụ robot

Akụkụ gripper

Mgba ọkụ eriri akụkụ nke robot
Modulu dị irè
Ụdị modulu
| Aha Ngwaahịa | Ụdị nlereanya | PN | Voltaji ọrụ | Ugbu A Na-arụ Ọrụ | njikọ | PN njikọ |
| Modulu mgbaama akụkụ nke robot | QCSM-15R2 | 7.Y00468 | 24V | 2.5A | D-Sub15R2-1000① | 1.Y10080 |
| Modulu mgbaama akụkụ gripper | QCSM-15G2 | 7.Y00469 | 24V | 2.5A | D-Sub15G2-1000① | 1.Y10081 |
| Modulu mgbaama akụkụ nke robot | QCSM-08R | 7.Y00477 | 380V | 30A | 3108A22-23S② | 1.Y10710 |
| Modulu mgbaama akụkụ gripper | QCSM-08G | 7.Y00478 | 380V | 30A | 3108A22-23P② | 1.Y10711 |
| Modulu mgbaama akụkụ nke robot | QCSM-19R | 7.Y00954 | 220V | 3A | MS3116F14-19S/-Y② | 1.Y11420 |
| Modulu mgbaama akụkụ nke robot | QCSM-19R | 7.Y00954 | 220V | 3A | CMB08E-14-19S(072)SR-B② | 1.Y11863 |
| Modulu mgbaama akụkụ nke robot | QCSM-19R1 | 7.Y02123 | 220V | 3A | MS3116F14-19S/-Y② | 1.Y11420 |
| Modulu mgbaama akụkụ nke robot | QCSM-19R1 | 7.Y02123 | 220V | 3A | CMB08E-14-19S(072)SR-B② | 1.Y11863 |
| Modulu mgbaama akụkụ gripper | QCSM-19G | 7.Y00955 | 220V | 3A | MS3116F14-19P/-Y② | 1.Y11419 |
| Modulu mgbaama akụkụ gripper | QCSM-19G | 7.Y00955 | 220V | 3A | CMB08E-14-19P(072)SR-B② | 1.Y11864 |
| Modulu mgbaama akụkụ nke robot | QCSM-26R | 7.Y00464 | 220V | 3A | MS3116F16-26S/-Y② | 1.Y11867 |
| Modulu mgbaama akụkụ nke robot | QCSM-26R | 7.Y00464 | 220V | 3A | CMB08E-16-26S(072)SR-B② | 1.Y11865 |
| Modulu mgbaama akụkụ gripper | QCSM-26G | 7.Y00465 | 220V | 3A | MS3116F16-26P/-Y② | 1.Y11369 |
| Modulu mgbaama akụkụ gripper | QCSM-26G | 7.Y00465 | 220V | 3A | CMB08E-16-26P(072)SR-B② | 1.Y11866 |
| Modulu mgbaama akụkụ gripper | QCSM-21/26G | 7.Y02117 | 220V | 3A | MS3116F16-26P/-Y② | 1.Y11369 |
| Modulu mgbaama akụkụ gripper | QCSM-21/26G | 7.Y02117 | 220V | 3A | CMB08E-16-26P(072)SR-B② | 1.Y11866 |
| Modulu mgbaama akụkụ nke robot | QCSM-32R | 7.Y02095 | 220V | 3A | MS3116F22-36S② | 1.Y13392 |
| Modulu mgbaama akụkụ nke robot | QCSM-32R | 7.Y02095 | 220V | 3A | MS3118F22-36S② | 1.Y13393 |
| Modulu mgbaama akụkụ gripper | QCSM-32G | 7.Y02096 | 220V | 3A | MS3116F22-36P② | 1.Y13394 |
| Modulu mgbaama akụkụ gripper | QCSM-32G | 7.Y02096 | 220V | 3A | MS3118F22-36P② | 1.Y13395 |
①Ogologo eriri ahụ bụ mita 1 ②Naanị njikọ, enweghị waya
Modulu Mgbatị Pneumatic
| Aha Ngwaahịa | Ụdị nlereanya | PN | Ụzọ Gas | Oghere Eriri |
| N'akụkụ robot Pneumatic Extension Module | QCAM-06G18R | 7.Y01015 | 6 | G1/8 |
| Gripper n'akụkụ Pneumatic Mgbatị Modulu | QCAM-06G18G | 7.Y01016 | 6 | G1/8 |
| N'akụkụ robot Pneumatic Extension Module | QCAM-06G18R-E | 7.Y01018 | 6 | G1/8 |
| Gripper n'akụkụ Pneumatic Mgbatị Modulu | QCAM-06G18G-E | 7.Y01019 | 6 | G1/8 |
| N'akụkụ robot Pneumatic Extension Module | QCAM-10M5R | 7.Y01053 | 10 | M5 |
| Gripper n'akụkụ Pneumatic Mgbatị Modulu | QCAM-10M5G | 7.Y01054 | 10 | M5 |
| N'akụkụ robot Pneumatic Extension Module | QCAM-14M5R | 7.Y01055 | 14 | M5 |
| Gripper n'akụkụ Pneumatic Mgbatị Modulu | QCAM-14M5G | 7.Y01056 | 14 | M5 |
| Akụkụ robot nke akpọrọ onwe ya Pneumatic Extension Module | QCAM-06G18R-F | 7.Y02005 | 6 | G1/8 |
| Akụkụ Gripper kpọsara onwe ya Pneumatic Extension Module | QCAM-06G18G-F | 7.Y02006 | 6 | G1/8 |
| N'akụkụ robot Pneumatic Extension Module | QCAM-04G38R | 7.Y02043 | 4 | G3/8 |
| Gripper n'akụkụ Pneumatic Mgbatị Modulu | QCAM-04G38G | 7.Y02044 | 4 | G3/8 |
Ụdị Modulu Ugboro Elu
| Aha Ngwaahịa | Ụdị nlereanya | PN | Voltaji ọrụ | Ugbu A Na-arụ Ọrụ |
| Modulu Mgbaàmà n'akụkụ robot | QCHFM-E14-C1R | 7.Y02003 | 1.4KV | 5A |
| Modulu Mgbaàmà n'akụkụ gripper | QCHFM-E14-C1G | 7.Y02004 | 1.4KV | 5A |
Modulu Mgbaàmà (njikwa eriri netwọk)
| Aha Ngwaahịa | Ụdị nlereanya | PN |
| Modulu mgbaama akụkụ nke robot | QCSM-RJ45-06R | 7.Y02007 |
| Modulu mgbaama akụkụ gripper | QCSM-RJ45-06G | 7.Y02008 |
Modulu Ike Servo
| Aha Ngwaahịa | Ụdị nlereanya | PN |
| Modulu ike servo nke robot n'akụkụ | QCSM-08R1 | 7.Y02080 |
| Modulu ike servo nke akụkụ gripper | QCSM-08G1 | 7.Y02081 |
Modulu Mgbaàmà Servo
| Aha Ngwaahịa | Ụdị nlereanya | PN |
| Modulu mgbaama servo n'akụkụ robot | QCSM-12R | 7.Y02082 |
| Modulu mgbaama servo n'akụkụ gripper | QCSM-12G | 7.Y02083 |
Modulu Ikuku Mmiri nke Onwe-Mkpuchi
| Aha Ngwaahịa | Ụdị nlereanya | PN |
| Modulu mgbaama akụkụ nke robot | QCWM-02R | 7.Y02049 |
| Modulu mgbaama akụkụ gripper | QCWM-02G | 7.Y02050 |
Azụmahịa Anyị


Ngwaahịa dị iche iche
-

DH ROBOTICS SERVO ELECTRIC GRIPPER AG usoro – ...
-

Usoro ihe eji ejide ọkụ eletrik DH ROBOTICS SERVO –...
-

Usoro ihe eji ejide ọkụ eletrik DH ROBOTICS SERVO –...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER PGC Usoro –...
-

Usoro ihe eji ejide ọkụ eletrik DH ROBOTICS SERVO –...
-

Usoro ihe eji ejide ọkụ eletrik DH ROBOTICS SERVO –...