Usoro ihe nkedo eletriki HITBOT – Z-EFG-C35 Njikọ aka eletriki




Isi Nkewa
Ogwe aka robot ụlọ ọrụ / Ogwe aka robot mmekorita / ihe njide eletriki / ihe na-eme ihe ngosi/ngwaọrụ akpaaka
Ngwa
Ngwa njide robot SCIC Z-EFG dị obere nha nwere sistemụ servo arụnyere n'ime ya, nke na-eme ka o kwe omume ịnweta njikwa ziri ezi nke ọsọ, ọnọdụ, na ike njide. Sistemụ njide SCIC dị elu maka ngwọta akpaaka ga-enye gị ohere imepe ohere ọhụrụ maka ịrụ ọrụ akpaaka nke ị na-echeghị na ọ ga-ekwe omume.

atụmatụ

· Nchọpụta mbelata gripper, ọrụ mmepụta mpaghara
· Enwere ike ijikwa ike, ọnọdụ na ọsọ nke ọma site na Modbus
·Ndụ ogologo: ọtụtụ iri nde okirikiri, karịa mbọ ikuku
· Onye njikwa arụnyere n'ime ya: obere akara ukwu, njikọta dị mfe
·Ụdị njikwa: 485 (Modbus RTU), I/O
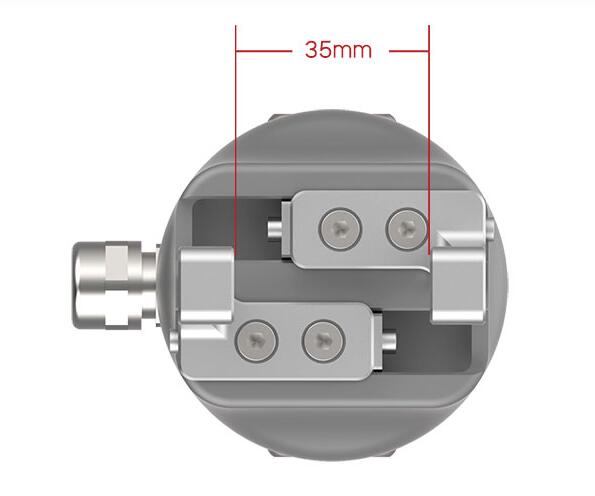
Ọkpụkpọ ahụ bụ 35mm, Ike Ịkpọchi bụ 50N. Ọ dakọtara na Ogwe Aka Robot nke 6-Axis.
Ugboro Elu
Oge kachasị mkpụmkpụ nke mmegharị ahụ bụ 0.5s
Nkọwapụta Dị Elu
Mmeghachi omume bụ ±0.03mm
Ibu Ọrụ Dị Elu
Ibu nkwado maka ijide ihe ≤1kg
Plọg na Play
Ihe njide eletriki pụrụ iche maka robot 6-axis
Ọdụ nwere ike ịgbanwe agbanwe
Ọdụ ya nwere ike ịgbanwe iji dabara maka ihe dị iche iche achọrọ
Nkwụnye Dị Mfe
Ọ nwere ike ijide ihe ndị na-adịghị ike ma nwee nkwarụ

● Ịkwalite mgbanwe n'ịnọchi anya nke ndị na-ejide ikuku site na iji ndị na-ejide ọkụ eletrik, nke mbụ na-ejide ọkụ eletrik na sistemụ servo agbakwunyere na China.
● Ndochi zuru oke maka compressor ikuku + nzacha + valvụ solenoid + valvụ throttle + ihe njide pneumatic
● Ogologo oge ọrụ ọtụtụ okirikiri, nke kwekọrọ na silinda Japan ọdịnala



Nhazi nkọwapụta
| Nọmba nlereanya Z-EFG-C35 | Paramita |
| Mkpọchi zuru oke | 35mm enwere ike ịgbanwe |
| Ike njide | 15-50N nwere ike ịgbanwe |
| Imeghachi ihe | ±0.03mm |
| Ibu ibu a na-atụ aro | ≤1kg |
| Ụdị nnyefe | Ihe e ji echekwa gia + Nduzi okirikiri |
| Mgbakwunye mmanụ nke ihe ndị na-agagharị agagharị | Kwa ọnwa isii ma ọ bụ otu nde mmegharị / oge |
| Oge mmegharị strok otu ụzọ | 0.5s |
| Ụdị mmegharị | Mkpịsị aka abụọ na-agagharị n'ahịrị kwụ ọtọ |
| Ibu | 0.5kg |
| Akụkụ (L*W*H) | 63 * 63 * 95mm |
| Voltaji ọrụ | 24V±10% |
| Egosiputara ugbu a | 0.3A |
| Oke ugbu a | 1A |
| Ike | 8W |
| Klas nchekwa | IP20 |
| Ụdị moto | Enweghị ahịhịa DC |
| Oke okpomọkụ ọrụ | 5-55℃ |
| Oke iru mmiri ọrụ | RH35-80 (Enweghị ntu oyi) |

| Ibu kwụ ọtọ a na-anabata n'akụkụ kwụ ọtọ | |
| Fz: | 150N |
| Torke a na-ekwe omume | |
| Mx: | 2.5 Nm |
| Nke m: | 2 Nm |
| Mz: | 3 Nm |
Ịkwọ ụgbọala na njikwa jikọtara n'ime
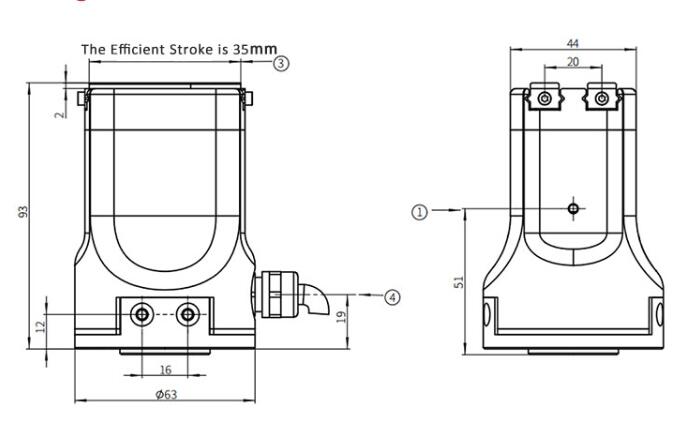
Ihe njide eletriki Z-EFG-C35 nwere sistemụ servo agbakọtara n'ime ya, mkpokọta strok ya bụ 35mm, ike njide ya bụ 15-50N, ike strok na njide ya nwere ike ịgbanwe agbanwe, a pụkwara imeghachi ya ugboro ugboro bụ ±0.03mm.

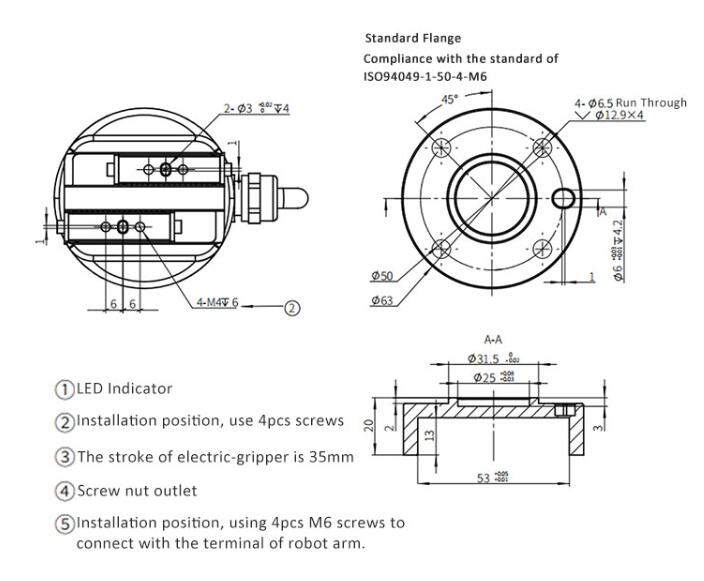
Dakọtara na Six-Axis Robot Arm

Ngwaahịa a dakọtara na ogwe aka robot 6-axis, iji mezuo plọg na egwuregwu, oge mkpụmkpụ kachasị mkpụmkpụ bụ naanị 0.5s, iji mezuo ihe achọrọ maka ngwa ngwa na nkwụsi ike maka ahịrị mmepụta.
Obere nha, Mgbanwe iji wụnye

Nha ngwaahịa Z-EFG-C35 bụ naanị L63*W63*H95mm, ọ dị obere, ma nwee ike ịwụnye ya n'ebe dị warara.


Mmeghachi omume ngwa ngwa, izi ezi maka njikwa ike

Ụdị mmegharị ya bụ mkpịsị aka abụọ yiri ibe ha, IP20 anaghị eguzogide mmiri, akụkụ nke njikọta njedebe ya nwere ike ịgbanwe n'oge ọ bụla, ndị ahịa nwere ike ịgbanwe ihe mkpuchi ahụ dịka ihe mmepụta chọrọ si dị.
Ọtụtụ ụdị njikwa, dị mfe ịrụ ọrụ

Nhazi nke Z-EFG-C35 dị mfe, ọtụtụ ụdị njikwa, gụnyere 485 (Modbus RTU), Pulse, I/O, ọ dakọtara na sistemụ njikwa isi PLC.

Ebe Ibu Ibu nke Mwepụ Ike Ike
Azụmahịa Anyị


Ngwaahịa dị iche iche
-

DH ROBOTICS SERVO ELECTRIC GRIPPER PGE SERIES –...
-
-300x2551-300x300.png)
DH ROBOTICS SERVO ELECTRIC GRIPPER PGSE usoro ...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER CG usoro – ...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER PGE SERIES –...
-

Usoro ihe eji ejide ọkụ eletrik HITBOT – Z-EFG-13...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER CG usoro – ...