Usoro ihe nkedo eletriki HITBOT – Z-EFG-C65 Njikọ aka eletriki




Isi Nkewa
Ogwe aka robot ụlọ ọrụ / Ogwe aka robot mmekorita / ihe njide eletriki / ihe na-eme ihe ngosi/ngwaọrụ akpaaka
Ngwa
Ngwa njide robot SCIC Z-EFG dị obere nha nwere sistemụ servo arụnyere n'ime ya, nke na-eme ka o kwe omume ịnweta njikwa ziri ezi nke ọsọ, ọnọdụ, na ike njide. Sistemụ njide SCIC dị elu maka ngwọta akpaaka ga-enye gị ohere imepe ohere ọhụrụ maka ịrụ ọrụ akpaaka nke ị na-echeghị na ọ ga-ekwe omume.

atụmatụ

· Nchọpụta mbelata gripper, ọrụ mmepụta mpaghara
· Enwere ike ijikwa ike, ọnọdụ na ọsọ nke ọma site na Modbus
·Ndụ ogologo: ọtụtụ iri nde okirikiri, karịa mbọ ikuku
· Onye njikwa arụnyere n'ime ya: obere akara ukwu, njikọta dị mfe
·Ụdị njikwa: 485 (Modbus RTU), I/O
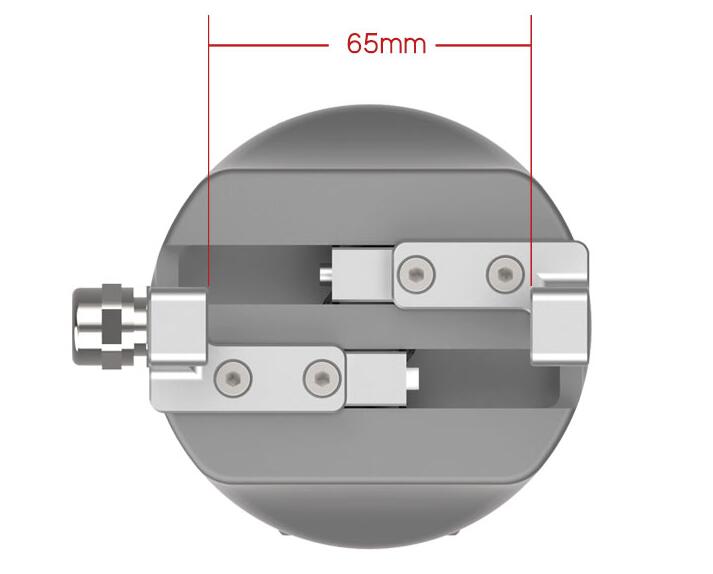
Stoke 65mm, Ike Mkpachi 300N, Dakọtara na Ogwe Aka Robot nke nwere axis 6
Ugboro Elu
Oge kachasị mkpụmkpụ nke mmegharị ahụ bụ 0.5s
Nkọwapụta Dị Elu
Mmeghachi omume bụ ±0.03mm
Ibu Ọrụ Dị Elu
Ibu nkwado maka ijide ihe ≤1.5 kg
Plọg na Play
Ihe njide eletriki pụrụ iche maka ogwe aka robot 6-axis
Ọdụ nwere ike ịgbanwe agbanwe
Ọdụ ya nwere ike ịgbanwe agbanwe, ọ dabara adaba maka ọtụtụ arịrịọ
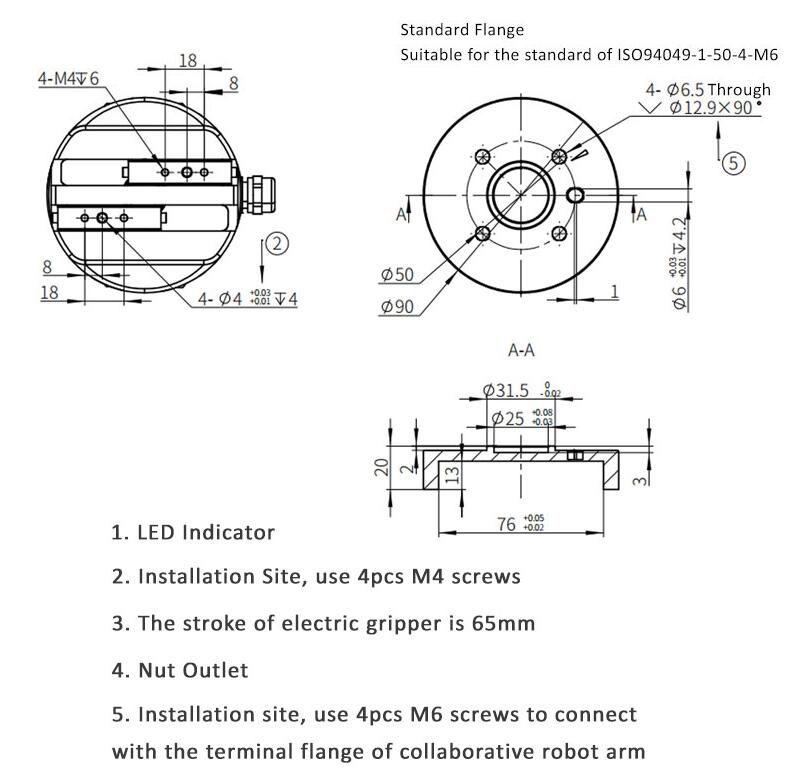
Nkwụnye Dị Mfe
Ọ nwere ike ijide ihe ndị na-adịghị ike ma nwee nkwarụ

● Ịkwalite mgbanwe n'ịnọchi anya nke ndị na-ejide ikuku site na iji ndị na-ejide ọkụ eletrik, nke mbụ na-ejide ọkụ eletrik na sistemụ servo agbakwunyere na China.
● Ndochi zuru oke maka compressor ikuku + nzacha + valvụ solenoid + valvụ throttle + ihe njide pneumatic
● Ogologo oge ọrụ ọtụtụ okirikiri, nke kwekọrọ na silinda Japan ọdịnala



Nhazi nkọwapụta
| Nọmba nlereanya Z-EFG-C65 | Paramita |
| Mkpọchi zuru oke | 65mm enwere ike ịgbanwe |
| Ike njide | 60-300N nwere ike ịgbanwe |
| Imeghachi ihe | ±0.03mm |
| Ibu ibu a na-atụ aro | ≤6kg |
| Ụdị nnyefe | Ihe e ji echekwa gia + Nduzi okirikiri |
| Mgbakwunye mmanụ nke ihe ndị na-agagharị agagharị | Kwa ọnwa isii ma ọ bụ otu nde mmegharị / oge |
| Oge mmegharị strok otu ụzọ | 0.5s |
| Ụdị mmegharị | Mkpịsị aka abụọ na-agagharị n'ahịrị kwụ ọtọ |
| Ibu | 1.5kg |
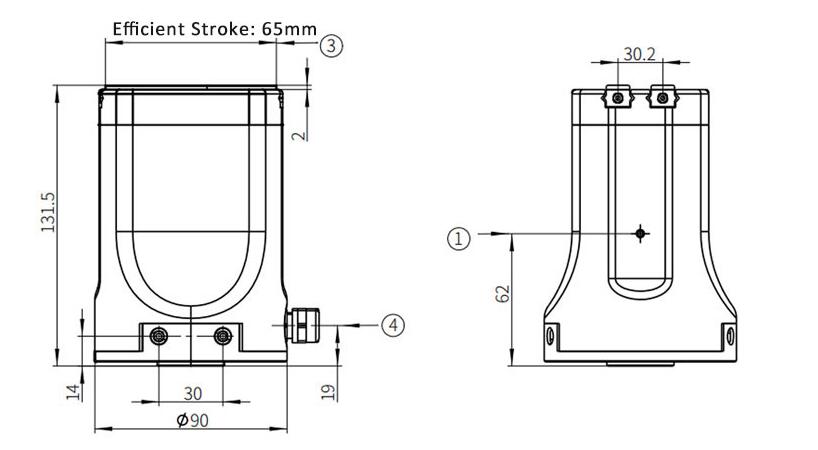
| Akụkụ (L*W*H) | 90*90*178mm |
| Voltaji ọrụ | 24V±10% |
| Egosiputara ugbu a | 0.8A |
| Oke ugbu a | 2A |
| Ike | 20W |
| Klas nchekwa | IP20 |
| Ụdị moto | Enweghị ahịhịa DC |
| Oke okpomọkụ ọrụ | 5-55℃ |
| Oke iru mmiri ọrụ | RH35-80 (Enweghị ntu oyi) |

| Ibu kwụ ọtọ a na-anabata n'akụkụ kwụ ọtọ | |
| Fz: | 600N |
| Torke a na-ekwe omume | |
| Mx: | 15 Nm |
| Nke m: | 15 Nm |
| Mz: | 15 Nm |
Ịnya ụgbọala na njikwa agbakwunyere
Ihe njide eletriki Z-EFG-C65 nwere sistemụ servo agbakwunyere n'ime ya, mkpokọta strok ya bụ 65mm, ike njide ya bụ 60-300N, ike strok na njide ya nwere ike ịgbanwe agbanwe, a pụkwara imeghachi ya ugboro ugboro bụ ±0.03mm.

Dakọtara na Six-Axis Robot Arm

Ihe njide eletriki nwere ike dakọtara na ogwe aka robot 6-axis, iji mezuo plọg na igwu egwu, oge mkpụmkpụ ya dị mkpụmkpụ bụ naanị 0.5s, nke nwere ike izute arịrịọ njide maka ahịrị mmepụta kwụsiri ike.
Obere nha, Mgbanwe iji wụnye

Z-EFG-C65 ga-agbaso ụdị nnyefe nke rack gia + ball guide rail, nha ngwaahịa bụ L90 * W90 * H178mm, enwere ike ịgbanwe ya ka ọ dị n'ọnọdụ obere mpaghara.


Mmeghachi omume ngwa ngwa, izi ezi maka njikwa ike

Oge kacha nta ma ọ bụrụ na otu strok bụ naanị 0.5s, ọ nwere ike ijikwa ọrụ njide ngwa ngwa, enwere ike ịgbanwe akụkụ ọdụ ya n'oge ọ bụla, ndị ahịa nwere ike ịgbanwe ọdụ dịka achọrọ.
Ọtụtụ ụdị njikwa, dị mfe ịrụ ọrụ

Nhazi nke Z-EFG-C50 dị mfe, nke nwere ọtụtụ ụdị njikwa, gụnyere 485 (Modbus RTU), Pulse, I/O, ọ dakọtara na sistemụ njikwa isi PLC.

Ebe Ibu Ibu nke Mwepụ Ike Ike
Azụmahịa Anyị


Ngwaahịa dị iche iche
-

DH ROBOTICS SERVO ELECTRIC GRIPPER AG usoro – ...
-

Usoro PGS nke DH ROBOTICS SERVO ELECTRIC GRIPPER –...
-

Usoro ihe eji ejide ọkụ eletrik DH ROBOTICS SERVO –...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER PGC Usoro –...
-

Usoro HITBOT ELECTRIC GRIPPER – Z-EFG-12 Paral...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER CG usoro – ...