Usoro ihe nkedo ọkụ eletrik HITBOT – Z-EFG-R Njikọta ọkụ eletrik



Isi Nkewa
Ogwe aka robot ụlọ ọrụ / Ogwe aka robot mmekorita / ihe njide eletriki / ihe na-eme ihe ngosi/ngwaọrụ akpaaka
Ngwa
Ngwa njide robot SCIC Z-EFG dị obere nha nwere sistemụ servo arụnyere n'ime ya, nke na-eme ka o kwe omume ịnweta njikwa ziri ezi nke ọsọ, ọnọdụ, na ike njide. Sistemụ njide SCIC dị elu maka ngwọta akpaaka ga-enye gị ohere imepe ohere ọhụrụ maka ịrụ ọrụ akpaaka nke ị na-echeghị na ọ ga-ekwe omume.

atụmatụ

·Obere ihe njide eletriki servo moto dị ike mana ọ dị ike.
·Enwere ike ịgbanwe ọdụ ụgbọ mmiri iji mezuo ihe dị iche iche achọrọ maka ọrụ ahụ.
·Nwere ike ibuli ihe ndị na-adịghị ike ma na-agbanwe agbanwe, dịka àkwá, ọkpọkọ nnwale, mgbaaka, wdg.
·Dabara adaba maka ihe nkiri na-enweghị isi iyi ikuku (dịka ụlọ nyocha, na ụlọ ọgwụ).
A na-etinye Sistemụ Servo Integrated maka ọtụtụ arịrịọ
Ike Mkpọchi Ukwu
Ike ijide: 80N,
ọrịa strok: 20mm
Njikwa Izizi
Mmegharị: ±0.02mm
Plọg na Play
Emebere nke ọma makaihe njide eletriki isii axis
Ejiri njikwa rụọ ọrụ
Obere mkpuchi mpaghara, dị mfe ijikọta.
Enwere ike ịgbanwe ọdụ
Enwere ike ịgbanwe ọdụ ya ka ọ bụrụ maka arịrịọ dị iche iche.
Nkwụnye Dị Mfe
Ọ nwere ike ijide ihe ndị na-adịghị ike

● Ịkwalite mgbanwe n'ịnọchi anya nke ndị na-ejide ikuku site na iji ndị na-ejide ọkụ eletrik, nke mbụ na-ejide ọkụ eletrik na sistemụ servo agbakwunyere na China.
● Ndochi zuru oke maka compressor ikuku + nzacha + valvụ solenoid + valvụ throttle + ihe njide pneumatic
● Ogologo oge ọrụ ọtụtụ okirikiri, nke kwekọrọ na silinda Japan ọdịnala




Nhazi nkọwapụta
Z-EFG-R bụ ihe njide eletriki robot nke nwere njikwa arụnyere n'ime ya na ọtụtụ ọrụ n'otu. Obere n'ogo, mana ọ dị ike n'ọrụ.
● Obere ihe njide eletriki servo moto dị ike mana dị ike.
●Enwere ike ịgbanwe ọdụ ụgbọ mmiri iji mezuo ihe dị iche iche achọrọ maka ọrụ ahụ.
● Nwere ike ibuli ihe ndị na-adịghị ike ma na-agbanwe agbanwe, dịka àkwá, ọkpọkọ nnwale, mgbaaka, wdg.
● Ọ dabara adaba maka ihe nkiri na-enweghị isi iyi ikuku (dịka ụlọ nyocha, na ụlọ ọgwụ).
Z-EFG-R bụ obere ihe njide eletriki nke nwere sistemụ servo agbakwunyere, ọ nwere ike dochie mgbapụta + nzacha + uru magnetik elektrọn + valvụ throttle + ihe njide ikuku.
| Nọmba nlereanya Z-EFG-R | Paramita |
| Mkpọchi zuru oke | 20mm |
| Ike njide | 80N |
| Imeghachi ihe | ±0.02mm |
| Ibu ibu a na-atụ aro | 0.8kg |
| Ụdị nnyefe | Ntuziaka maka gia + cross roller |
| Mgbakwunye mmanụ nke ihe ndị na-agagharị agagharị | Kwa ọnwa isii ma ọ bụ otu nde mmegharị / oge |
| Oge mmegharị strok otu ụzọ | 0.45s |
| Oke okpomọkụ ọrụ | 5-55℃ |
| Oke iru mmiri ọrụ | RH35-80 (Enweghị ntu oyi) |
| Ụdị mmegharị | Mkpịsị aka abụọ na-agagharị n'ahịrị kwụ ọtọ |
| Njikwa ọrịa strok | A na-agbanwe agbanwe |
| Mgbanwe ike ijidesi ike | A na-agbanwe agbanwe |
| Ibu | 0.5kg |
| Akụkụ (L*W*H) | 68*68*132.7mm |
| Ntinye onye njikwa | E wuru n'ime ya |
| Ike | 5W |
| Ụdị moto | Enweghị ahịhịa DC |
| Voltaji e gosiri | 24V |
| Oke ugbu a | 1A |
| Ogwe aka robot isii axis a na-agbanwe agbanwe | UR, Aubo |
A na-arụnye akwọ ụgbọala na njikwa n'ime ya
Z-EFG-R bụ obere ihe njide eletriki nke nwere sistemụ servo agbakwunyere, ọ nwere ike dochie mgbapụta ikuku + nzacha + valvụ magnetik electron + valvụ throttle + ihe njide ikuku.


Dakọtara na Six-Axis Robot Arm
Ihe njide ahụ nwere ike dakọtara na ogwe aka robot isii nke bụ isi, iji mezuo plọg na igwu egwu, o nwere strok ogologo 20mm, ike njide bụ 80N, enwere ike ịgbanwe ike strok na njide ya.
Obere Foto, Mgbanwe Ịwụnye
Nha Z-EFG-R bụ L68*W68* H132.7mm, nhazi ya dị obere, na-akwado ụzọ nrụnye dị iche iche, onye njikwa arụnyere n'ime ya, obere oghere na-ejupụta, ọ dị mfe itinye maka arịrịọ dị iche iche nke ọrụ njide.

Ngwa ngwa imeghachi omume, njikwa izi ezi
Oge mmegharị kacha mkpụmkpụ nke otu strok bụ 0.45s, ike imegharị ya bụ ±0.02mm, enwere ike ịgbanwe akụkụ ọdụ ya n'ụzọ dị mfe, ndị ahịa nwere ike ijide ihe ahụ dịka arịrịọ si dị.
Eserese Nwụnye Akụkụ
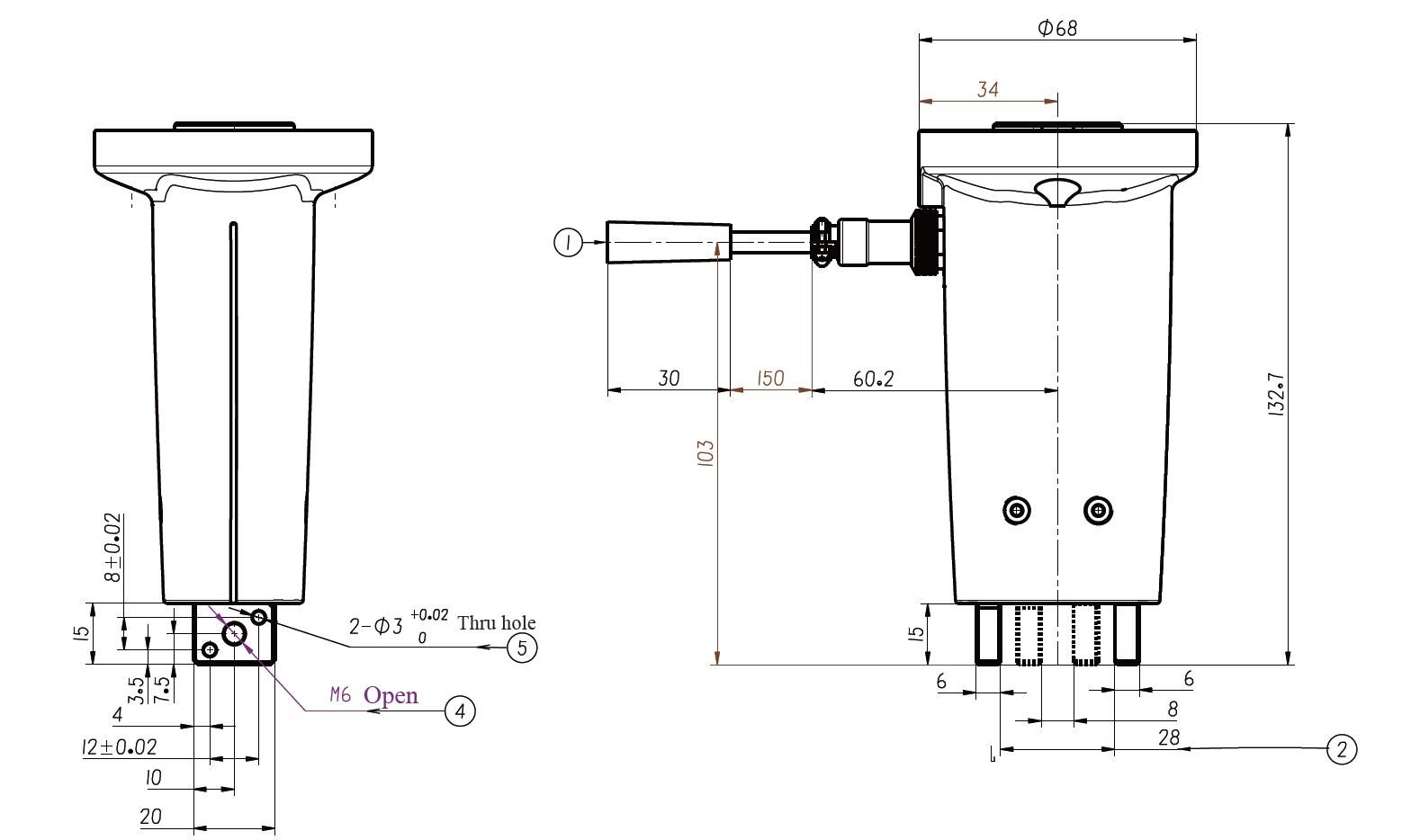
① RKMV8-354 Nkwụnye ụgbọelu isi ise na RKMV8-354
② Ọkpụkpọ nke ihe njide eletriki bụ 20mm
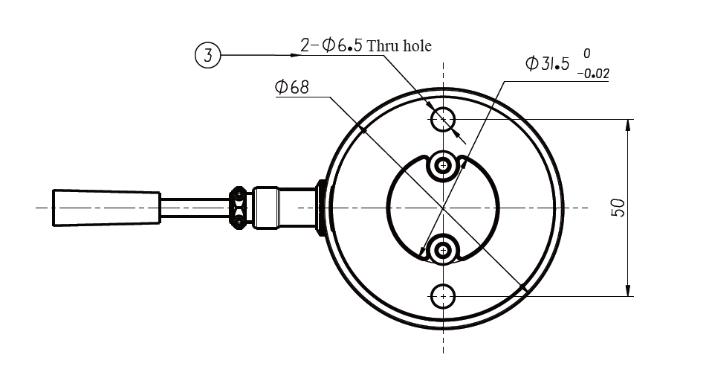
③ Ọnọdụ ntinye, jiri skru M6 abụọ jikọọ na flange na njedebe nke ogwe aka robot UR
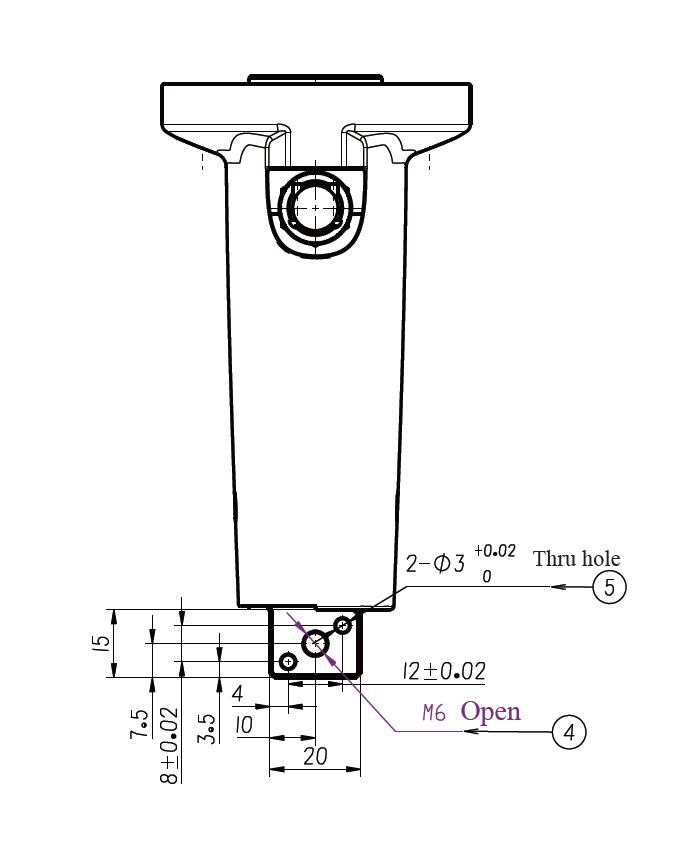
④ Ọnọdụ ntinye, ọnọdụ ntinye ihe eji arụ ọrụ (skru M6)
⑤ Ọnọdụ ntinye, ọnọdụ ntinye ihe eji arụ ọrụ (oghere pin cylindrical atọ)
Ngwaọrụ eletriki
Voltaji a tụrụ aro 24±2V
Ugbu a 0.4A

Azụmahịa Anyị


Ngwaahịa dị iche iche
-

DH ROBOTICS SERVO ELECTRIC GRIPPER PGE SERIES –...
-

Usoro ihe eji ejide ọkụ eletrik DH ROBOTICS SERVO –...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER PGE SERIES –...
-

Usoro HITBOT ELECTRIC GRIPPER – Z-EFG-50 Paral...
-

Usoro ihe eji ejide ọkụ eletrik DH ROBOTICS SERVO –...
-

Usoro ihe eji ejide ọkụ eletrik HITBOT – Z-EFG-40...